MIGHTY: A New Dawn for Autonomous Flight Path Planning
Revolutionizing UAV Navigation with Advanced Trajectory Planning Techniques
Introdução à Nova Era dos UAVs
No mundo dinâmico de hoje, os veículos aéreos não tripulados (UAVs) se tornaram uma ferramenta crítica em diversas aplicações, desde buscas e resgates até inspeções industriais. Após desastres, como terremotos e acidentes nucleares, a necessidade de tecnologias que possam navegar em ambientes desafiadores se torna evidente. Contudo, garantir que esses robôs possam traçar rotas eficientes e seguras em tempo real sempre foi um desafio significativo.
Inovações da MIGHTY
Pesquisadores do MIT e da Universidade da Pensilvânia introduziram o MIGHTY, um sistema de planejamento de trajetória que promete alterar a forma como os UAVs operam em ambientes complexos. Este sistema é um marco em planejamento de rota, permitindo que um UAV reaja a obstáculos em milissegundos, simultaneamente garantindo um caminho de voo suave que minimiza o tempo de viagem.
Desenvolvendo Soluções para Desafios do Mundo Real
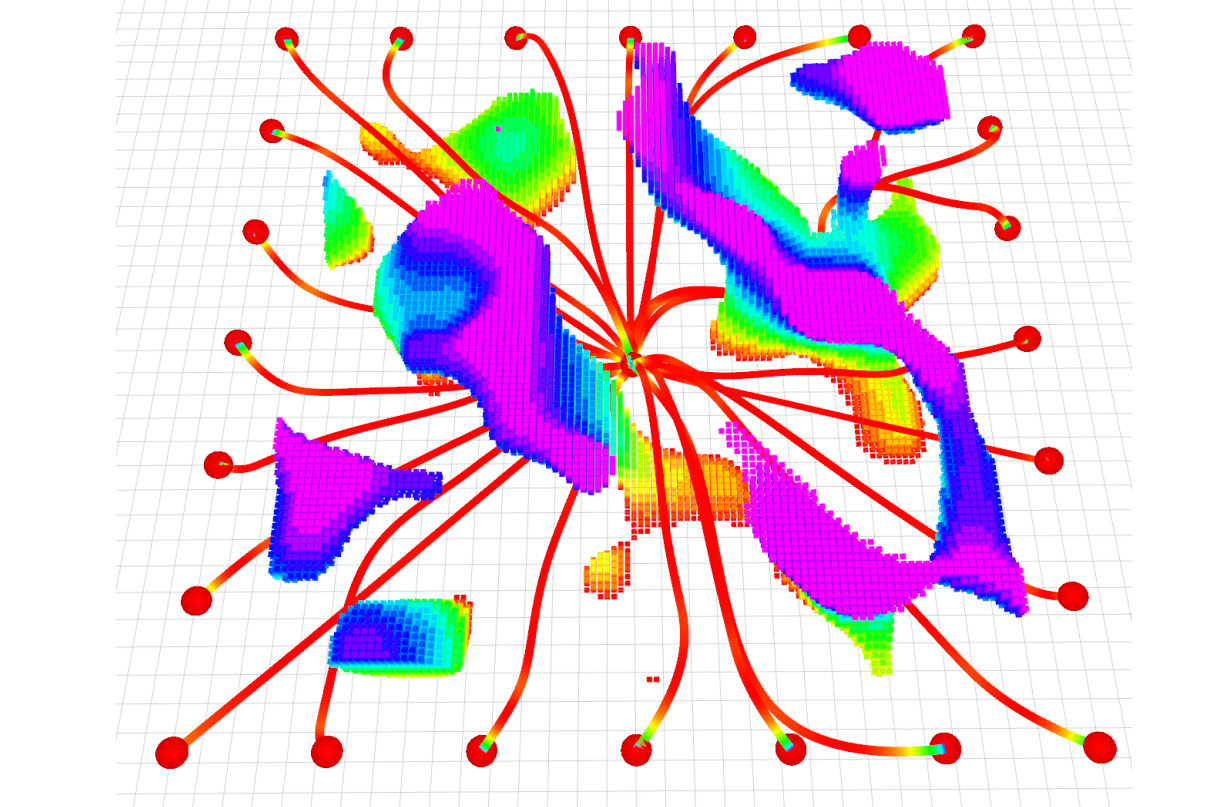
O MIGHTY utiliza uma nova formulação matemática que proporciona ao robô a capacidade de viajar de forma segura para seu destino ao longo de um caminho viável, sendo menos intensivo computacionalmente do que outras técnicas. Isso significa que o MIGHTY é capaz de gerar trajetórias mais suaves em menor tempo comparado aos métodos atuais. Além disso, o sistema é suficientemente eficiente para operações em tempo real utilizando apenas o computador e os sensores a bordo do robô.
Um Sistema Aberto e Acessível
O MIGHTY se destaca por sua natureza open-source, retirando a barreira de custos que softwares proprietários muitas vezes impõem. Isto democratiza o planejamento de trajetórias de alta performance, permitindo que qualquer pesquisador, estudante ou empresa ao redor do mundo utilize a tecnologia livremente. “Ao remover essa barreira de custo, o MIGHTY ajuda a democratizar o planejamento de trajetória de alta performance e abre portas para uma comunidade mais ampla construir sobre esse trabalho,” afirma Kota Kondo, estudante de pós-graduação em aeronautics e astronautics e autor principal do artigo sobre o planejador de trajetória.
Benefícios Potenciais em Diversas Aplicações
Com seus poderosos recursos, o MIGHTY não apenas é uma solução para missões de busca e resgate, mas também é aplicável em áreas como entrega de última milha em ambientes urbanos, onde os UAVs precisam evitar edifícios, fios elétricos e pessoas. Kondo e sua equipe veem o potencial do MIGHTY em inspeções industriais de estruturas complexas, como turbinas eólicas, onde a segurança e a eficiência são fundamentais.
Superando Desafios Computacionais
Durante o desenvolvimento, os pesquisadores enfrentaram um desafio crucial presente em muitos sistemas open-source: a estimativa do tempo de viagem. Sistemas existentes costumam usar um tempo de viagem fixo para rapidamente gerar uma trajetória, mas isso pode forçar o UAV a aumentar a velocidade, dificultando a evitação de perigos súbitos. O MIGHTY, em contraste, emprega uma técnica matemática chamada spline de Hermite, que otimiza o tempo de viagem e o caminho de voo simultaneamente, resultando em uma trajetória mais controlável e suave.
Resultados Promissores
Os experimentos simulados demonstraram que o MIGHTY precisa de apenas cerca de 90% do tempo de computação necessário por métodos de última geração, abrindo novas possibilidades para aviões não tripulados e destacando a evolução em planejamento de trajetória.
Conclusão
Com o MIGHTY, estamos apenas começando a vislumbrar as infinitas possibilidades que tecnologias avançadas de UAV podem proporcionar. Este sistema não só permite que os robôs naveguem em ambientes desafiadores, mas também protege os seres humanos, permitindo que eles permaneçam fora de situações perigosas enquanto os robots fazem seu trabalho. À medida que continuamos a explorar esta nova fronteira, o futuro dos UAVs parece mais promissor do que nunca.