Nova técnica de mapeamento subaquático revela o invisível em águas turvas
Pesquisadores do MIT desenvolvem sistema inovador que combina imagem óptica e dados acústicos para navegação em ambientes desafiadores.

Desvendando o desconhecido nas profundezas
Com a evolução das tecnologias submarinas, a dificuldade de navegar e mapear águas turvas tem sido um dos desafios mais significativos enfrentados por veículos submersos. Quando esses veículos operam em fundos marinhos ou cavam através de leitos de areia, a perturbação do sedimento pode gerar nuvens de partículas que obstruem a visão das câmeras a bordo. A espera até que a poeira marinha assente se torna um obstáculo para a continuidade das operações.
No entanto, uma nova técnica de mapeamento subaquático desenvolvida por engenheiros do MIT e da Woods Hole Oceanographic Institution (WHOI) promete revolucionar a forma como os veículos subaquáticos navegam em águas de baixa visibilidade. Esta nova abordagem funde imagens visuais de câmeras ópticas com dados acústicos provenientes de sensores de sonar, permitindo uma representação mais precisa e acessível do ambiente subaquático.

Utilizando essa técnica, os veículos podem rapidamente mapear a forma geral de seu entorno usando sonar, mesmo em condições de visibilidade comprometida. Com isso, o veículo pode se mover em direção a determinadas formas no ambiente mapeado por sonar, chegando perto o suficiente para que as câmeras ópticas possam resolver visualmente objetos específicos com detalhes impressionantes.
Esse método é descrito como uma combinação de ecolocalização de golfinhos e a visão de curto alcance de tartarugas marinhas, permitindo a percepção e navegação em tempo real através de águas turvas.
Experimentos e validações
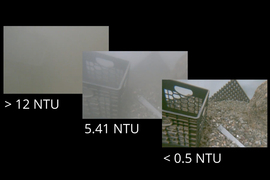
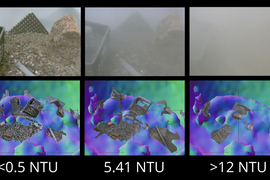
A equipe de pesquisadores testou a técnica em experimentos de tanque, onde puderam controlar o grau de visibilidade da água. Mesmo nas condições mais turvas, o sistema conseguiu ver através do sedimento, mapeando o ambiente do tanque e visualizando detalhes em escala centimétrica dos objetos presentes.
Segundo Amy Phung, estudante de pós-graduação do Departamento de Aeronáutica e Astronáutica do MIT, que liderou o trabalho, "esperamos que este trabalho nos possibilite realizar mais operações em ambientes desafiadores de baixa visibilidade e ajude a fornecer mais cobertura em áreas que são difíceis de operar atualmente".
Futuro promissor com Sonar-MASt3R
A técnica em desenvolvimento, nomeada de Sonar-MASt3R, não só apresenta um avanço tecnológico, mas também tem potencial para guiar veículos subaquáticos de maneira segura em ambientes turvos para uma série de aplicações, incluindo exploração científica, construção e manutenção subaquática, e recuperação em profundidades oceânicas.
A técnica de fusão que combina imagem óptica e sonar, conhecida como “fusão opto-acústica”, promete transcender as limitações de abordagens anteriores, que tradicionalmente utilizavam apenas uma das duas metodologias. Ao integrar as vantagens das câmeras ópticas, que oferecem imagens visuais detalhadas, com a robustez dos sensores de sonar, que funcionam bem tanto em águas claras quanto turvas, esta inovação pode ampliar significativamente as capacidades de exploração subaquática.
O trabalho realizado por Amy Phung e seu coautor, Richard Camilli, cientista sênior de física oceânica aplicada e engenharia do WHOI, foi apresentado em um artigo durante a IEEE International Conference on Robotics and Automation (ICRA), consolidando a importância desta pesquisa para o futuro das operações subaquáticas.